


ロボットアセンブリ
PCB製造向けの高精度ロボットアセンブリ—医療、産業、自動車、コンシューマー電子機器に最適です。自動化された高速実装、一貫した品質、スケーラブルな生産が特徴です。DFMサポート、AOI/X線検査、迅速納品と連携し、効率向上、コスト削減、信頼性の高いアセンブリを実現します。
✅ 自動化された高精度実装
✅ 厳しい品質管理
説明
PCBA業界におけるロボット組立の応用概要
ロボット組立とは、部品実装、はんだ付け、テスト、挿入、包装などのコア工程を含め、PCBAプロセス全体または主要な作業を自動化されたロボットシステムによって自動化する技術を指します。知能製造の中心的構成要素として、ロボット組立はキングフィールド社がPCBA生産効率を向上させ、製品の一貫性を確保し、高付加価値製造のニーズに対応するための重要な技術的支援となっています。その応用は試作から量産までのライフサイクル全般にわたり、「人的集中型」から「技術集中型」へのPCBA業界の変革を推進しています。

I. PCBAロボット組立の主な適用シナリオ
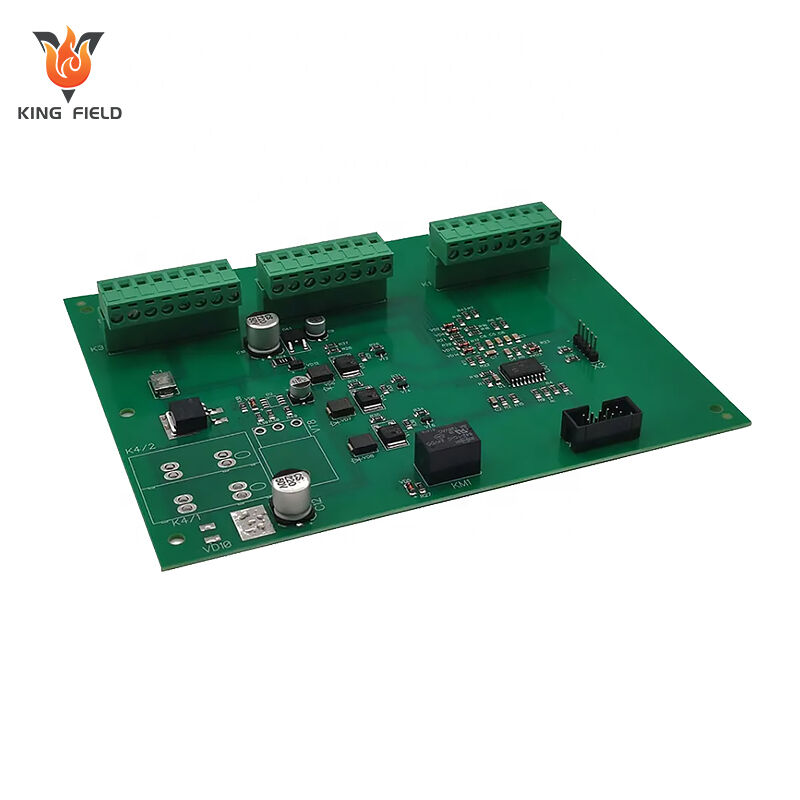
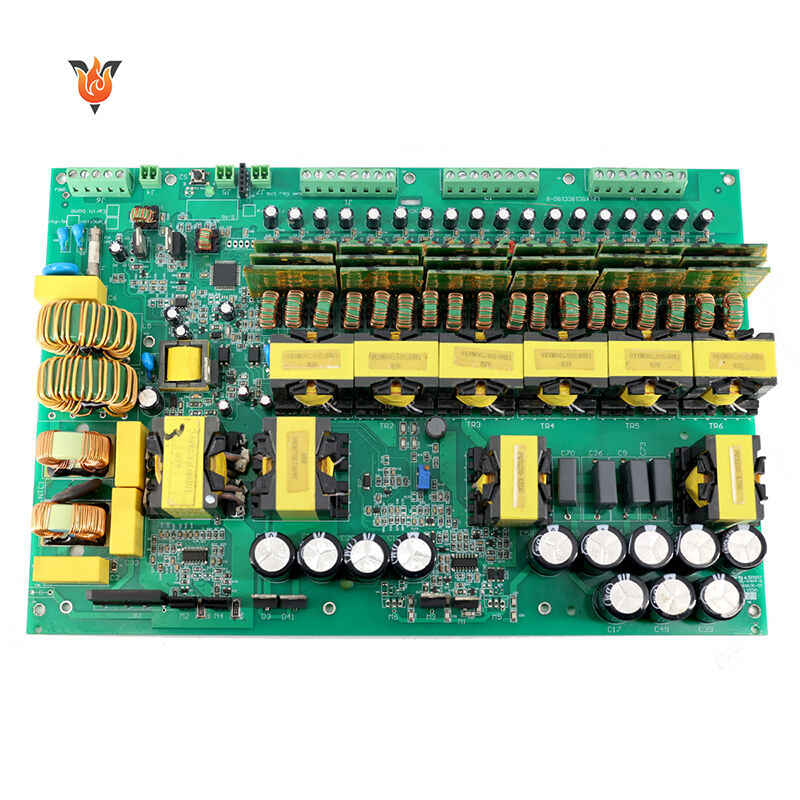
1. 高精度部品実装
ロボットによる組立はSMT工程で最も広く使用されており、ピックアンドプレース機やペースト印刷機などの自動化システムを含む主要装置が活用されています。超小型部品、BGA、QFPなど高精度パッケージデバイスでは、ビジョン位置決め技術によりロボットが正確な実装を実現し、実装速度は毎時10万ポイント以上に達し、手作業の効率を大きく上回ります。これはキングフィールド社の高密度PCB、Mini LEDドライバーボードなどの高級製品の生産ニーズに対応しており、手作業による部品の位置ずれ、逆向き実装、実装漏れなどの問題を回避し、実装歩留まりを大幅に向上させます。
2. 自動溶接および接続
ロボットによるはんだ付けは、PCBAにおける電気的接続の信頼性を確保するための重要な工程です。
主流技術には以下のものがあります。
・リフローはんだ付けロボット: これらは、正確な温度制御プロファイルを通じて部品のバッチはんだ付けを実現し、手作業のはんだ付けでよく見られる冷たはんだ接合、ブリッジング、過熱による損傷などの問題を回避します。
・セレクティブウェーブはんだ付けロボット: これらはプログラマブルノズルを通じて正確にはんだを噴霧し、スルーホール部品に対応し、ハイブリッド実装(SMT+THD)のPCBA製品に適応することで、はんだ付けの一貫性を向上させます。
・レーザーはんだ付けロボット: 高精度・高信頼性が求められる場面で使用され、熱影響範囲が小さく、微細なはんだ接合部や熱に敏感な部品のはんだ付けに適しています。
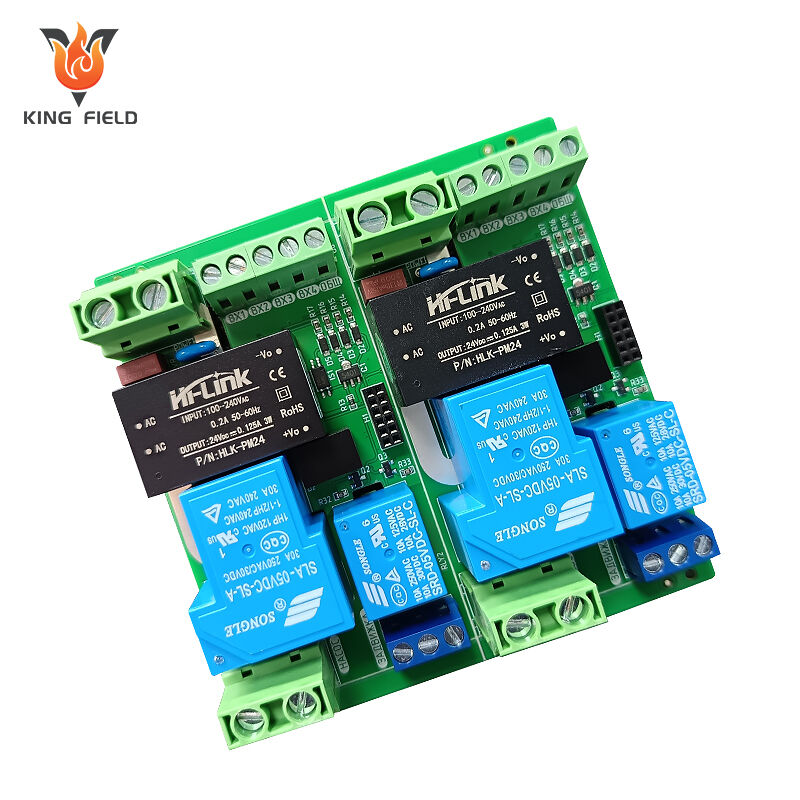
3. 挿入および組立の自動化
手動挿入を必要とするスルーホールデバイスに対して、ロボットアームと治具の組み合わせにより、ロボット組立システムが自動挿入を実現します:
複数のデバイスタイプ間での柔軟な切り替えをサポートし、プログラマブルロジックを通じて異なるPCBA製品の挿入要件に適応します。手動挿入における不均一な挿入力に起因する、効率の低さ、作業強度の高さ、装置の損傷などの問題を解決し、産業用制御基板や電源基板など、キングフィールドにおける大量生産シナリオに特に適しています。
4. 自動テストおよび品質管理
ロボットによる組立と検査技術の深層的統合により、「組立-検査」のフィードバックループを形成します。
・外観検査ロボット: AIビジョンアルゴリズムを使用して、部品の配置ずれ、はんだ欠陥、部品の欠落などの問題を自動的に検出します。検査速度は手作業の5〜10倍で、誤検出率は0.1%未満です。
・インサーキットテスト(ICT)ロボット: PCBAの電気性能テストを自動的に実施し、データをリアルタイムでMESシステムにアップロードして品質のトレーサビリティを確保します。
・X線検査ロボット: BGA、CSP、その他のパッケージデバイスの裏面はんだ接合部にX線透過検査を用いて隠れたはんだ欠陥を検出し、高信頼性製品の品質を保証します。
5. バックエンドパッケージングおよび最終組立
PCBAのバックエンド工程では、ロボットによるアセンブリがシェル包装、コネクタの挿入・取り外し、ケーブルのはんだ付けなどの作業を担当します。協働ロボットは人間と連携しながら、重いシェルの組立や精密なケーブルのはんだ付けといった複雑な工程を完遂し、柔軟性と精度の両立を実現します。キングフィールドのカスタマイズニーズに対応し、多品種小ロット生産の迅速な切り替えをサポートすることで、製品納期の短縮を実現します。
II. ロボットアセンブリの主要な利点
1. 効率の向上:手作業による生産性のボトルネックを打破
ロボットは疲労や感情の乱れなく24時間稼働が可能です。単一のロボット生産ラインの能力は、手作業の生産ラインの3〜5倍にあたります。大量注文の場合、複数のロボットが連携することで「無人生産」を実現でき、生産サイクルを大幅に短縮し、キングフィールドが顧客の納品ニーズに迅速に対応できるよう支援します。
2. 品質保証:製品の一貫性を継続的に向上
ロボットによる組立は、手作業による組立と比較して再現性と運転安定性が優れており、部品実装のずれやはんだ接合不良などの欠陥率を百万分の1以下に抑えることができます。デジタルプログラミングとパラメータの固定化により、すべてのPCBAの生産基準が完全に一致するようになり、自動車電子機器や医療機器など極めて高い信頼性が求められる業界に特に適しています。これにより、キングフィールドの品質に対する評判がさらに強化されます。
3. コスト最適化:長期的に生産コストを削減
ロボットへの初期投資は高いが、長期的にはコストを大幅に削減できる:
• 労働コスト:熟練労働者への依存を減らし、採用、教育、管理コストを低減;
• 損失コスト:手動作業による部品の損傷やPCBの廃棄を減少させ、材料の損失率を低下;
• 管理コスト:MESシステムを通じた生産データのリアルタイム監視により、生産スケジュールの最適化と能力の無駄の削減を実現します。
4. フレキシブルな生産:多様でカスタマイズされたニーズに適応可能。
最新のロボット組立システムは、迅速なプログラミングと工程切替をサポートしています。キングフィールドのカスタマイズPCBA事業においては、大規模な設備改造を必要とせず、1〜2時間以内に生産ラインのパラメータを調整でき、「小ロット、多品種」の注文を効率的に生産可能となり、市場への対応力が向上します。
5. 安全性の向上:生産における安全リスクの低減
PCBAの生産プロセスには、はんだ付け、高温、化学物質など、潜在的なリスクが伴います。ロボットによる組立は、これらの高リスク工程を人間の労働に代わって実行でき、職場での負傷リスクを低減します。同時に、協働ロボットは衝突検出機能を備えており、人間と安全に共同作業することが可能で、生産効率と運用安全性の両立を実現します。
III. キングフィールドロボットアセンブリの技術的特徴と応用価値
PCBA業界における技術ノウハウと顧客ニーズに基づき、キングフィールドは「カスタマイズ+スマート+統合」のロボットアセンブリソリューションを開発しました。
• カスタマイズ対応:業界ごとのPCBA製品の特性に合わせてロボット組立パラメータを最適化します。
• 智能統合:AI視覚検査、MES生産管理システム、デジタルツイン技術を統合し、生産プロセスのリアルタイム監視、データのトレーサビリティ、および智能最適化を実現します。
• 統合サービス:ロボット選定から生産ラインの設置、プログラミング・デバッグ、保守メンテナンスまでの一貫したフルプロセスサービスを提供し、顧客が迅速に自動化生産を導入できるよう支援するとともに、技術的ハードルの低減を実現しています。ロボット組立技術の深層的活用により、キングフィールドは生産効率と製品品質の両面での向上を達成するだけでなく、「高効率・信頼性・カスタマイズ対応」のPCBAソリューションを顧客に提供し、高密度・高信頼性・カスタム対応型PCBA分野における中核的競争力を強化し、業界のインテリジェント製造のアップグレードを牽引しています。

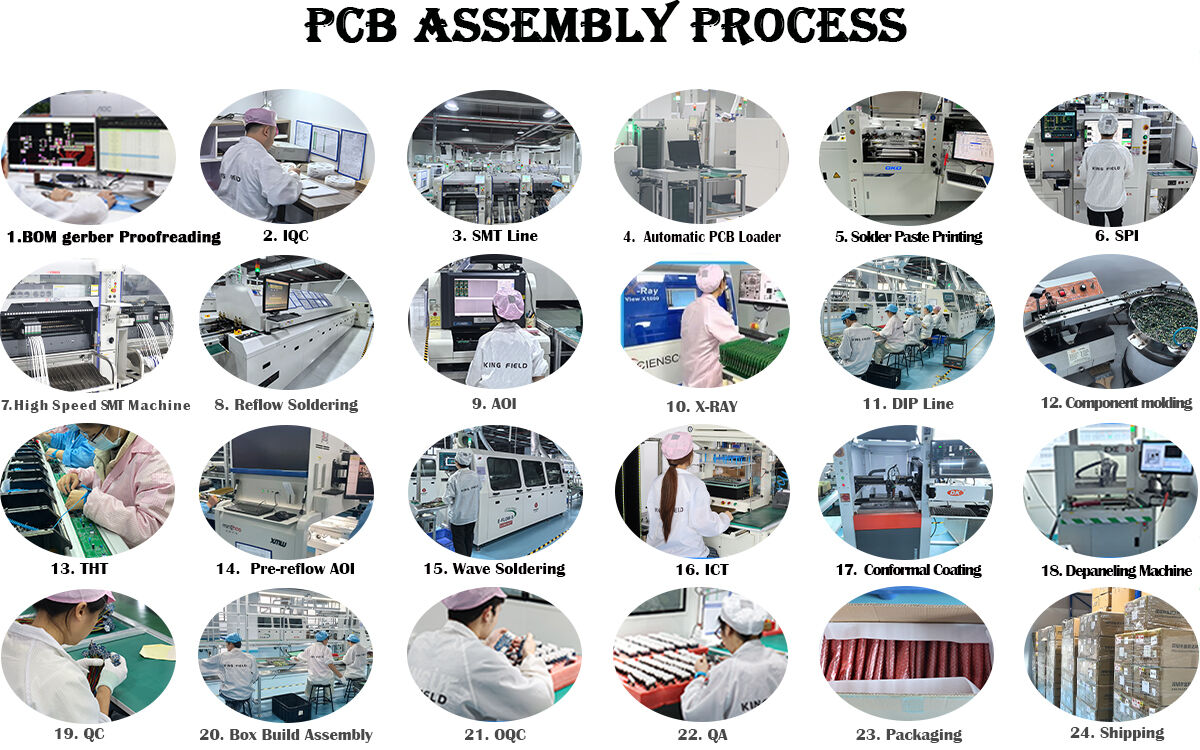
組み立てプロセス
ロボットによるPCB組立工程のステップバイステップ概要
ロボットによるPCBアセンブリは、高精度のメカニズム、ビジョン位置決め、および知能制御を統合した自動化プロセスです。その核となるのは「精密な位置決め-部品ハンドリング-精密アセンブリ-品質検査」というクローズドループです。以下に、実際の工業生産ロジックに沿った、標準化されたステップバイステップの手順を示します。
1. 事前準備:
・PCBの洗浄および位置決め: ロボットは自動ローディングモジュールを通じてPCB基板を受け取ります。最初に、プラズマクリーニングまたはブラシによる除塵を行い、はんだパッドの油分やほこりを除去します。その後、PCBはキャリアに固定され、リファレンスポイントの視覚認識によってPCB座標系をキャリブレーションし、アセンメーション基準の精度を確保します。
・パラメータの事前設定およびプログラムのインポート: PCB設計資料に基づき、部品座標、パッケージ仕様、アセンメーション順序などのパラメータを制御システムにインポートします。ロボットはオフラインプログラミングまたはティーチインモードにより、干渉リスクを回避するよう動作パスを事前設定します。
・材料の準備: 表面実装部品をコンベアベルト、トレイ、またはチューブラックに装填します。材料検出モジュールが部品モデルおよび向きを正しく認識した後、部品がロボットのピッキングステーションへ搬送されます。
2. コアアセンブリ:部品のピックアップ - ポジショニング - 組み立て
ステップ1: 部品のピックアップ ロボットアームには真空ノズルまたはグリッパーが装備されており、部品のサイズに応じて適切なツールに自動切り替えます。ビジョンシステムを使用してラック上の部品の位置および向きを識別し、正確に部品をピックアップすることで、部品の損傷や落下を回避します。
ステップ2 部品の向き補正 ピックアップ後、部品はビジョン検査モジュールによって再度識別され、オフセットや回転角度が補正されます。これにより、特にBGAやQFPなどの高密度パッケージ部品において、ピンとPCBパッドの正確な位置合わせが保証されます。
ステップ3 精密な実装:ロボットはプリセットされたパスに沿ってPCB上の対応するパッド位置まで移動し、部品をスムーズに配置するか、パッドの穴に挿入します。表面実装技術(SMT)プロセスでは、部品がパッドに取り付けられた後、真空ノズルが圧力を解放します。スルーホールプロセスでは、ロボットアームが部品のピンを完全に挿入するのを補助し、良好な接触を確保します。
ステップ4 溶接および硬化:SMT実装では、組み立てられたPCBはリフロー炉に搬送され、はんだペーストが高温で硬化され、部品とPCB間の電気的接続が実現されます。ロボットにはオンラインはんだ付けモジュールを装備でき、スルーホール部品のウェーブはんだ付けやスポットはんだ付けを完了できます。
3. 品質検査:リアルタイムでの検証と不良品の除去
・オンライン視覚検査(AOI): ロボットによる実装後、AOI検査装置がPCBを自動スキャンし、標準画像と比較して部品の欠落、部品の誤実装、位置ずれ、冷じわはんだ接合などの欠陥をミクロンレベルの精度で識別します。
・電気的性能試験: スプリングプローブテスト(ベッドオブニードル)またはフライングプローブテストモジュールを通じて、導通や絶縁などPCB回路の電気的パラメータを測定し、潜在的な故障を排除します。
・欠陥対応: 検出された不良品は自動的にマークされ、修正ステーションへ搬送されます。一方、合格品は次の工程へ進み、「実装-検査-選別」の自動化されたクローズドループを実現します。
4. 後続工程:完成品処理およびデータトレーサビリティ
• PCBの洗浄および保護: 合格した製品は、粉塵除去およびコンフォーマルコーティングを経た後、残留不純物や組立欠陥がないか再び目視検査されます。
• 自動アンロードおよびパッケージング: ロボットが組み立て済みのPCBをキャリアから取り外し、バッチ単位でボックスまたはコンベアラインに整然と積み込み、その後のパッケージング工程に備えます。
• データ記録およびトレーサビリティ: 組立パラメータはプロセス全体を通して収集され、MESシステムに同期されて生産レポートを生成し、製品ライフサイクル全体のトレーサビリティを実現するとともに、工程の最適化と品質管理を支援します。
製造能力
| 装置製造工程能力 | |||||
| SMT生産能力 | 60,000,000チップ/日 | ||||
| THT生産能力 | 1,500,000 チップ/日 | ||||
| 納期 | 迅速対応:24時間 | ||||
| 実装可能なPCBの種類 | 剛性基板、柔軟性基板、剛軟結合基板、アルミ基板 | ||||
| 実装用PCB仕様 | 最大サイズ:480x510 mm;最小サイズ:50x100 mm | ||||
| 最小実装部品 | 01005 | ||||
| 最小BGA | 剛性基板 0.3 mm;フレキシブル基板 0.4 mm | ||||
| 最小ピッチ部品 | 0.2mm | ||||
| 部品配置において極めて重要である | ±0.015mm | ||||
| 最大部品高さ | 25mm | ||||

