


Robotmontage
Præcisionsrobot-assembly til PCB-produktion – ideel til medicinske, industrielle, automobil- og forbrugerelektronikapplikationer. Automatiseret højhastighedsplacering, konstant kvalitet og skalerbar produktion. Kombineret med DFM-support, AOI/X-ray-testning og hurtig levering – øg effektiviteten, reducer omkostninger og sikr pålidelige assemblys.
✅ Automatisk højpræcisionsplacering
✅ Streng kvalitetskontrol
Beskrivelse
Oversigt over robotmontageapplikationer i PCBA-industrien
Robotmontage henviser til automatisering af hele PCBA-processen eller nøgledrift gennem automatiserede robotsystemer, dækkende kerneområder såsom komponentplacering, lodning, test, indsættelse og emballage. Som en central del af intelligent produktion er robotmontage blevet en vigtig teknologisk støtte for Kingfield til at forbedre PCBA-produktionseffektiviteten, sikre produktkonsistens og tilpasse sig behovene i højteknologisk produktion. Dets anvendelse dækker hele livscyklussen fra prototyping til masseproduktion og driver PCBA-industriens transformation fra "arbejdskraftintensiv" til "teknologisk intensiv".

I. Kerneanvendelsesscenarier for PCBA-robotmontage
1. Højpræcisionskomponentmontering
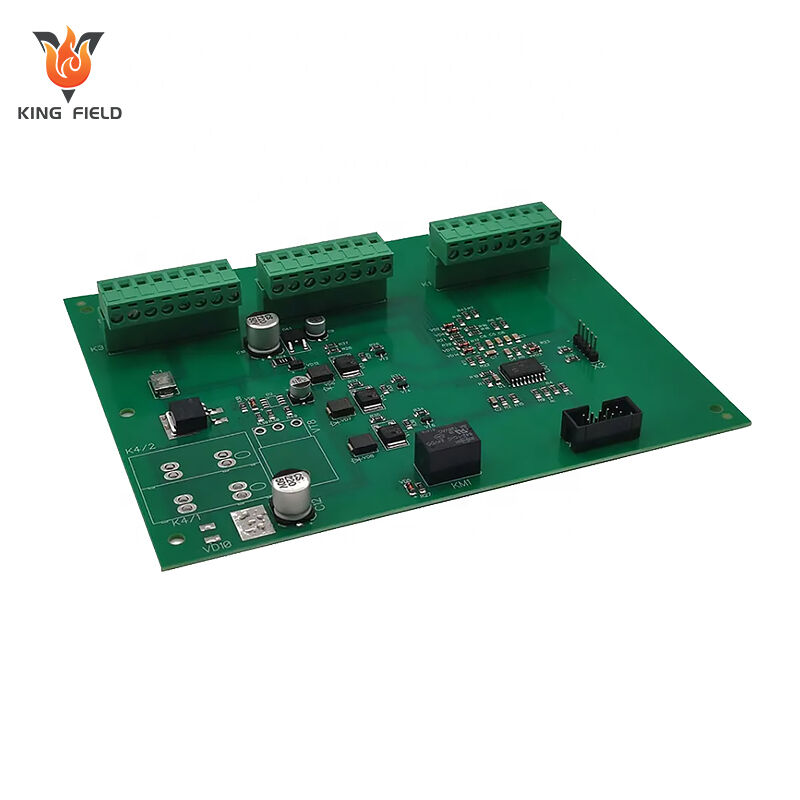
Robotassmling er mest udbredt i SMT-processen, med kerneudstyr som automatiserede systemer såsom placérmaskiner og printpastaprintere. For højpræcise pakkerede enheder såsom ekstremt miniaturekomponenter, BGA og QFP opnår robotter nøjagtig placering gennem billedpositioneringsteknologi, med placeringshastigheder på over 100.000 punkter i timen, langt over stående effektivitet. Det er kompatibelt med Kingfields produktionsbehov for højdensitets PCB'er, Mini LED-driverkort og andre high-end-produkter, undgår problemer såsom komponenter, der er placeret forkert, vendt eller helt mangler, forårsaget af manuel placering, og forbedrer markant udbyttet ved placering.
2. Automatisk svejsning og tilslutning
Robotsvejsning er en nøgleproces for at sikre pålideligheden af elektriske forbindelser i PCBAs.
Markedets førende teknologier inkluderer:
· Reflödlodningsrobotter: Disse opnår batchkomponentlodning gennem præcise temperaturstyringsprofiler og undgår problemer såsom kolde lodninger, kortslutning og overophedningsskader, som ofte ses ved manuel lodning.
· Selektiv bølgelodningsrobotter: Disse sprøjter præcist lodning via programmerbare dysler til komponenter med gennemhuller, tilpasser sig hybridmontage (SMT+THD) PCBA-produkter og forbedrer konsistensen i lodningen.
· Lodelodningsrobotter: Anvendt i højpræcisions- og højtydelsesscenarier, har disse robotter et lille varmepåvirkede område og er velegnede til lodning af små lodninger og varmefølsomme komponenter.
3. Automatisering af indsættelse og montage
For gennemhulsdele, der kræver manuel indsættelse, opnår det robotterstyrede montagesystem automatiseret indsættelse gennem en kombination af robotarme og fastgøringsvoringer:
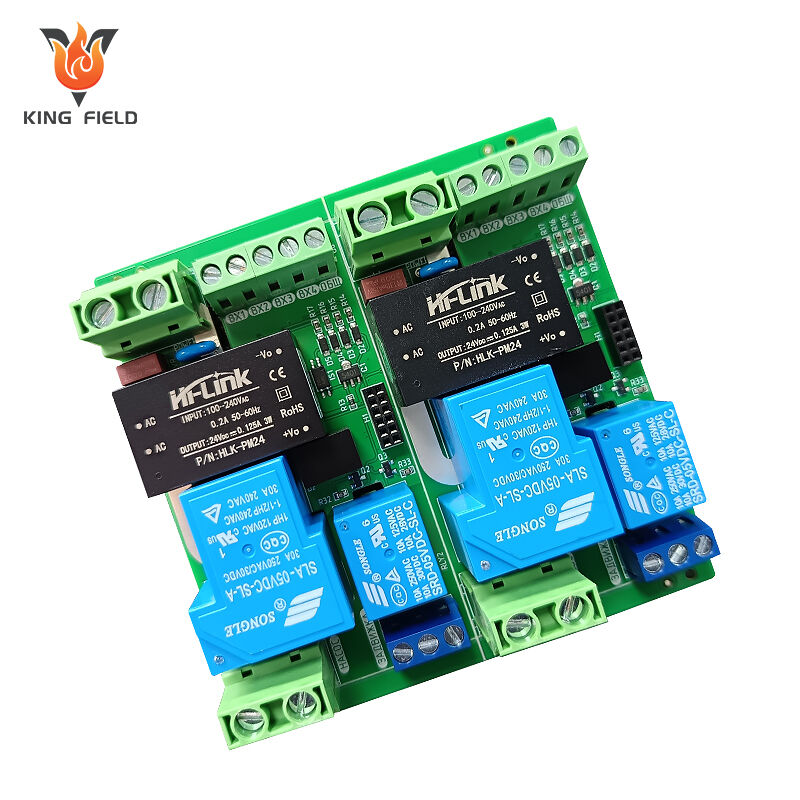
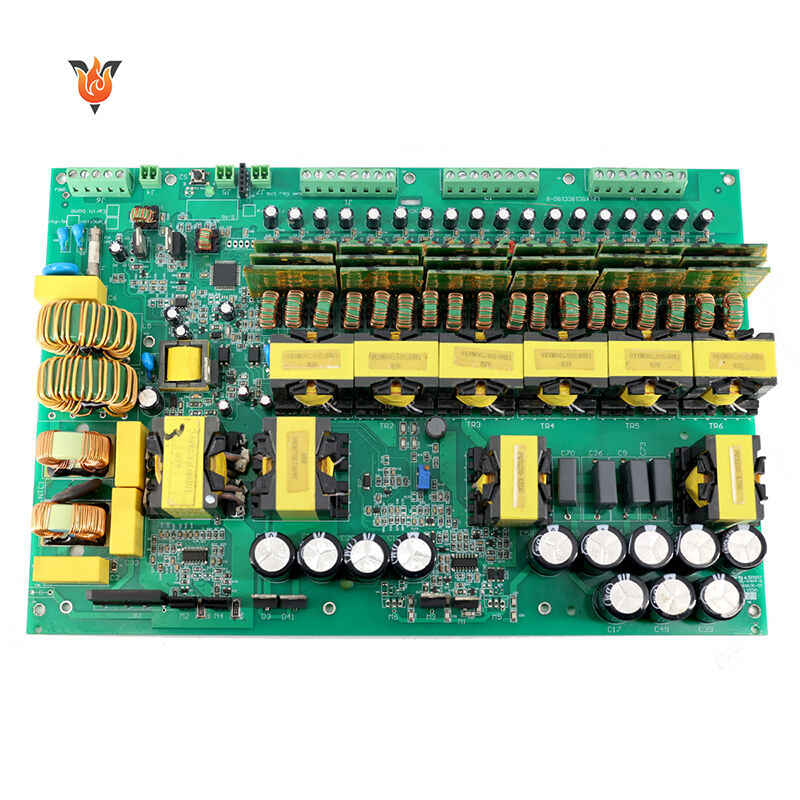
Det understøtter fleksibel skiftning mellem flere enhedstyper og tilpasser sig indsættelseskravene for forskellige PCBA-produkter gennem programmerbar logik; det løser problemer som lav effektivitet, høj arbejdsintensitet og enhedsskader forårsaget af ujævn indsættelseskraft ved manuel indsættelse og er især velegnet til Kingfield i masseproduktionsscenarier såsom industrielle styreplader og strømplader.
4. Automatiseret testning og kvalitetskontrol
Den dybe integration af robotter til samling og inspektion danner en lukket kreds af »samling-inspektion«:
· Visuel inspektionsrobot: Identificerer automatisk problemer såsom forkert placering, loddedefekter og manglende komponenter ved hjælp af AI-baserede billedgenkendelsesalgoritmer. Inspektionhastigheden er 5-10 gange hurtigere end manuel inspektion, med en falsk positiv rate på under 0,1 %;
· In-Circuit Test (ICT) robot: Udfører automatisk elektrisk ydelsestest på PCBAs og uploader data i realtid til MES-systemet for kvalitetsmålbart sporbarhed;
· Røntgeninspektionsrobot: Afdækker skjulte loddefejl i bagside-loddeforbindelserne på BGA, CSP og andre pakkerede enheder ved hjælp af røntgen-gennemtrængningsinspektion og sikrer dermed kvaliteten af produkter med høj pålidelighed.
5. Bagudrettet pakning og endelig samling
I bagudrettede processer for PCBA er robotter ansvarlige for operationer såsom kassettepakning, stikforbindelser til indsættelse/udtagning og kabelsoldering: Samarbejdsrobotter arbejder sammen med mennesker for at fuldføre komplekse processer såsom tung kassettesamling og præcisionskabelsoldering og skaber dermed balance mellem fleksibilitet og nøjagtighed; Tilpasset Kingfields specialtilpassede behov, understøtter hurtig omstilling mellem mange varianter og små serier og forkorter produktleveringstider.
II. Robotassemblings kernefordele
1. Effektivitetsforbedring: Banebrydende gennembrud i manuel produktivitet
Roboterne kan arbejde døgnet rundt uden træthed eller følelsesmæssige forstyrrelser. Kapaciteten for en enkelt robotmonteringslinje er 3-5 gange så høj som for en manuel produktionslinje. Ved store ordrer kan "ubemandet produktion" opnås gennem samarbejde mellem flere robotter, hvilket markant kan forkorte produktionscyklussen og hjælpe Kingfield med at svare hurtigt på kundens leveringbehov.
2. Kvalitetssikring: Kontinuerlig forbedring af produktets ensartethed
Robotmontage byder på overlegen gentagelighed og driftsstabilitet i forhold til manuel montage, hvilket holder defektrater som placeringstolerancer og loddefejl under én per million. Gennem digital programmering og fastlåsning af parametre sikres det, at produktionsstandarderne for hver PCBA er helt ens, hvilket gør det særlig velegnet til industrier med ekstremt høje krav til pålidelighed, såsom bil-elektronik og medicinsk udstyr, og dermed styrker Kingfields ry for kvalitet.
3. Omkostningsoptimering: Langsigts reduktion af samlede produktionsomkostninger
Selvom startinvesteringen i robotter er høj, kan de betydeligt reducere omkostninger på lang sigt:
• Lønomkostninger: Reduceret afhængighed af faglærte medarbejdere, hvilket sænker omkostninger forbundet med rekruttering, uddannelse og personaleadministration;
• Spildomkostninger: Reduceret skade på komponenter og bortkastelse af printkort forårsaget af manuel håndtering, hvilket sænker materialeforbruget;
• Ledelsesomkostninger: Real tids overvågning af produktionsdata gennem MES-systemet optimerer produktionsscheduling og reducerer kapacitetsspild.
4. Fleksibel produktion: tilpasselig til mangeartede og skræddersyede behov.
Moderne robotter til samling understøtter hurtig programmering og omstilling. For Kingfields skræddersyede PCBA-forretning kan produktionslinjens parametre justeres inden for 1-2 timer uden omfattende udstandsændringer, hvilket muliggør effektiv produktion af "små serier, mange serier" og forbedrer markedsrespons.
5. Sikkerhedsopgradering: Formindskelse af sikkerhedsrisici i produktionen
Produktionsprocessen for PCBA indebærer potentielle risici som lodning, høj temperatur og kemikalier. Robotter kan erstatte menneskeligt arbejde ved udførelse af højriskoprocedurer og dermed reducere risikoen for arbejdsulykker. Samtidig har samarbejdende robotter kollisionsdetektering og kan arbejde sikkert sammen med mennesker, hvilket skaber balance mellem produktionseffektivitet og driftssikkerhed.
III. Tekniske funktioner og anvendelsesværdi af Kingfield robotmontage
Ud fra sin teknologiske ekspertise og kundens behov i PCBA-industrien har Kingfield udviklet en "tilpasset + intelligent + integreret" robotmontageløsning:
• Tilpasset tilpasning: Optimering af robotmonteringsparametre for at passe til karakteristika for PCBA-produkter inden for forskellige brancher;
• Intelligent integration: Integration af AI-baseret visuel inspektion, MES-produktionsstyringssystem og digital twin-teknologi for at opnå realtidsovervågning, sporbarhed af data og intelligent optimering af produktionsprocessen;
• Integreret service: Tilbyder fuld proces fra robotvalg, produktionslinieopsætning, programmering og fejlretning til efterliggende vedligeholdelse, hvilket hjælper kunder med hurtigt at implementere automatiseret produktion og sænke tekniske barrierer. Gennem dybdegående anvendelse af robotmontageteknologi opnår Kingfield ikke kun en dobbelt forbedring af produktions-effektivitet og produktkvalitet, men leverer også kunderne ”effektive, pålidelige og skræddersyede“ PCBA-løsninger. Dette styrker dens kernekonkurrenceevne inden for højdensitet, høj pålidelighed og skræddersyede PCBA-løsninger samt driver intelligent fremstillingsopgraderingen i branchen.

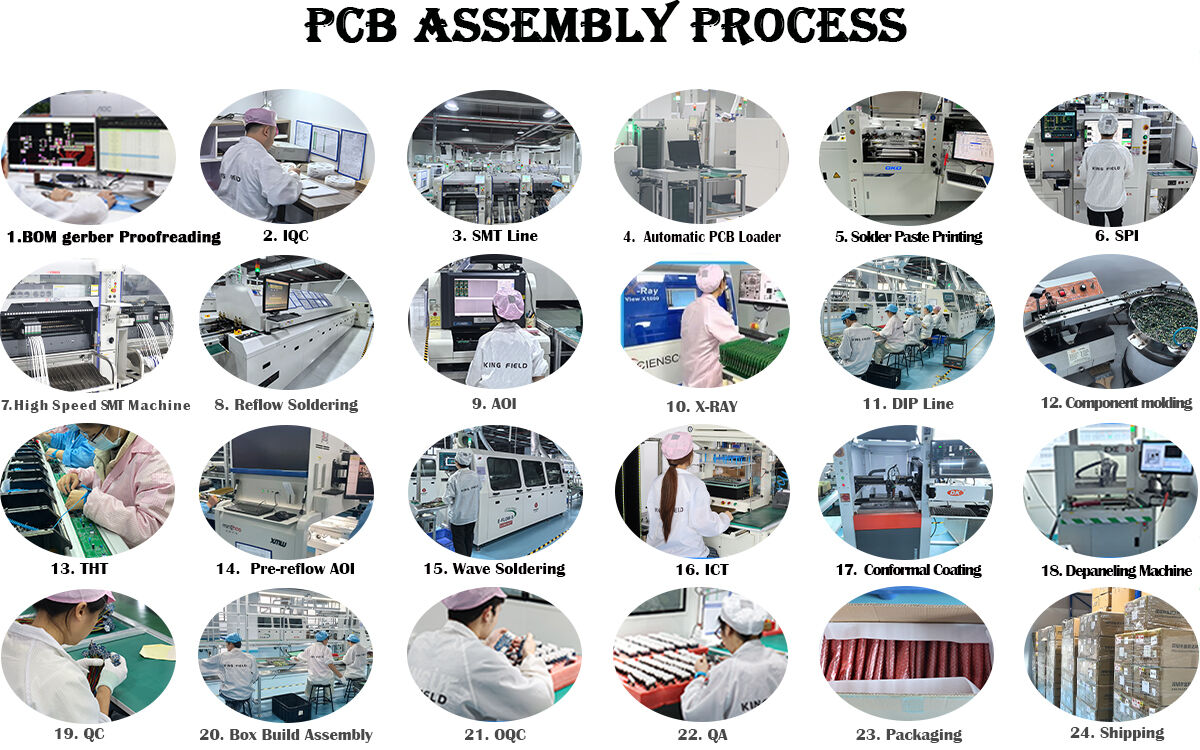
Monteringsproces
Trin-for-trin oversigt over robot-PCB-montageproces
Robotiseret PCB-assembly er en automatiseret proces, der integrerer præcisionsmekanik, visuel positionering og intelligent styring. Dens kerne drejer sig om en lukket kreds af "præcis positionering – komponenthåndtering – præcis montage – kvalitetsinspektion". Nedenfor følger en standardiseret, trin-for-trin gennemgang, som er i overensstemmelse med den faktiske industrielle produktionslogik:
1. Forberedelser:
· PCB-rengøring og positionering Robotten modtager PCB-pladen via en automatiseret indløsningsmodul. Først gennemgår den plasma-rengøring eller børsterengøring for at fjerne olie og støv fra lodningspadderne. Derefter fastgøres PCB'en på en bærer, og koordinatsystemet kalibreres ved hjælp af visuel genkendelse af referencepunkter for at sikre nøjagtigheden af monteringsreferencen.
· Parametreforudindstilling og programimport: Basert på PCB-design dokumentation importeres parametre såsom komponentkoordinater, pakke-specifikationer og monteringsrækkefølge til kontrolsystemet. Robotten forudindstiller sin bevægelsesbane gennem offline-programmering eller indlæringsmetode for at undgå interferensrisici.
· Materialeforberedelse: Overflademonterede komponenter indlæses på transportbånd, bakker eller rørformede stativer. Når materialedektionsmodulet bekræfter, at komponentmodel og orientering er korrekte, transporteres komponenterne til robotpickenes aflæsningsstation.
2. Kerneopbygning: Komponenthåndtering - Positionering - Montering
Trin 1: Komponenthåndtering: Den robottermede arm er udstyret med et vakuumdyse eller griber og skifter automatisk til det passende værktøj afhængigt af komponentens størrelse. Den bruger et billedsystem til at identificere position og orientering af komponenterne på racken og henter dem præcist, så skader eller fald af komponenter undgås.
Trin 2: Korrektion af komponentorientering: Efter opsamling gennemgår komponenterne en sekundær identifikation via billedinspektionsmodulet for at korrigere eventuelle forskydninger eller rotationsvinkler, hvilket sikrer nøjagtig justering mellem pinner og PCB-pads, især velegnet til højt integrerede pakker som BGA og QFP.
Trin 3: Præcisionsmontering Roboten bevæger sig langs en forudindstillet bane til den korresponderende kontaktfladeposition på printpladen og placerer komponenten jævnt eller indsætter den i hullet på fladen. I overflademonteringsprocessen frigiver vakuumdysetrykket, når komponenten er fastgjort til fladen. I gennemhulsprocessen hjælper robotarmen med fuldt ud at indsætte komponentens ben for at sikre god kontakt.
Trin 4: Svejsning og afhærdning Til SMT-montering transporteres den samlede printplade til en ovl, hvor lodpasta afhærdes ved høje temperaturer for at opnå elektrisk forbindelse mellem komponenterne og printpladen. Robotten kan udstyres med en online-lodningsenhed til at udføre bølgesoldring eller punktsoldring af gennemhulskomponenter.
3. Kvalitetsinspektion: Real tidsverifikation og fjernelse af defekter
· Online visuel inspektion (AOI): Efter robotassemblering scanner AOI-inspektionsudstyr automatisk PCB'en, sammenligner den med standardbilleder og identificerer defekter såsom manglende komponenter, forkerte komponenter, misdrejning og kolde lodforbindelser, med inspektionsnøjagtighed ned til mikrometer-niveau.
· Elektriske ydelsesprøvning: Gennem bed-of-needle-test eller flyvende probe-testmoduler testes elektriske parametre på PCB-kredsløbet, såsom ledningsevne og isolation, for at eliminere skjulte fejl.
· Håndtering af defekter: Defekte produkter, der bliver registreret, bliver automatisk markeret og transporteret til reparationssstationen, mens godkendte produkter går videre til næste proces, hvilket opnår en automatiseret lukket loop af "assemblering-inspektion-sortering".
4. Efterfølgende processer: Færdigproduktbehandling og datasporebarhed
• Rengøring og beskyttelse af PCB Kvalificerede produkter gennemgår støvafskærmning og konform-belægning, efterfulgt af en visuel geninspektion for at sikre, at der ikke er resterende urenheder eller montagefejl.
• Automatisk udlastning og emballage: Roboter fjerner samlede PCB'er fra bærere og stable dem pænt i partier i beholdere eller transportbånd, klar til efterfølgende emballeringsprocesser.
• Dataregistrering og sporbarhed: Samleparametre indsamles gennem hele processen og synkroniseres til MES-systemet for at generere produktionsrapporter, hvilket understøtter fuld sporbarhed gennem produktets livscyklus og letter procesoptimering og kvalitetskontrol.
Produktionskapacitet
| Udstyrsfremstillingsproceskapacitet | |||||
| SMT-kapacitet | 60.000.000 chips/dag | ||||
| THT-kapacitet | 1.500.000 chips/dag | ||||
| Leveringstid | Hurtig 24 timer | ||||
| Typer af PCB'er tilgængelige til samling | Stive boards, fleksible boards, rigid-flex boards, aluminiumsboards | ||||
| PCB-specifikationer for samling | Maksimal størrelse: 480x510 mm; Minimal størrelse: 50x100 mm | ||||
| Minimum samlekomponent | 01005 | ||||
| Minimum BGA | Stive plader 0,3 mm; Fleksible plader 0,4 mm | ||||
| Minimum fint pitched komponent | 0.2 mm | ||||
| Nøjagtig komponentplacering | ±0,015 mm | ||||
| Maksimal komponenthøjde | 25 mm | ||||

