


Robotite montaaž
Täpne robotkomplekteerimine PCB-de valmistamiseks – ideaalne meditsiini-, tööstus-, autotööstuse ja tarbeelektroonikale. Automatiseeritud kiire paigutus, järjepidev kvaliteet ja skaalatav tootmine. Koos DFM-toega, AOI/röntgenkontrolliga ja kiire kohaletoimetamisega – suurenda tõhusust, vähenda kulusid ja taga usaldusväärsed komplektid.
✅ Automatiseeritud kõrge täpsusega paigutus
✅ Range kvaliteedinõue
Kirjeldus
Ülevaade robotmontaaži rakendustest PCBA-tööstuses
Robotmontaaž viitab kogu PCBA-protsessi või oluliste toimingute automatiseerimisele automaatsete robotisüsteemide kaudu, hõlmates tuumavaldkondi nagu komponentide paigutamine, jootmine, testimine, sisestamine ja pakendamine. Intellectuaalse tootmise keskse komponendina on robotmontaaž saanud oluliseks tehnoloogiliseks tugiks Kingfieldile PCBA tootmisefektiivsuse parandamisel, toodete ühtlase kvaliteedi tagamisel ja kõrgetasemelise tootmise nõuetele kohanemisel. Selle rakendus hõlmab kogu elutsükklit prototüübimisest massitootmiseni, edendades PCBA-tööstuse muundumist "töömahukast" „tehnoloogiamahuka“.

I. PCBA robotmontaaži põhirakendussenaariumid
1. Kõrge täpsusega komponentide paigutamine
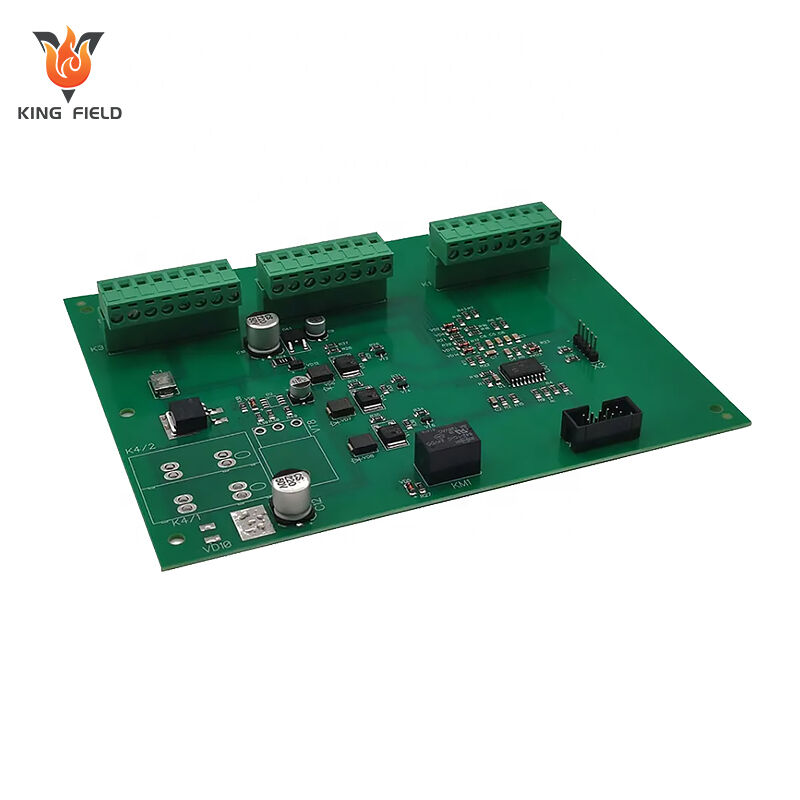
Robotite montaaž on kõige laiemalt kasutusel SMT-protsessis, mille hulka kuulub tuumaseadmetena automatiseeritud süsteemid, nagu asetsemismasinad ja solderpastaprindrid. Kõrge täpsusega pakendatud seadmete puhul, nagu ultraväikesed komponendid, BGA ja QFP, saavutavad robotid visioonipositsioneerimistehnoloogia abil täpse asetsemise, asetsemiskiirusega üle 100 000 punkti tunnis, mis on palju kõrgem kui käsitsi töötlemise tulemus. See vastab Kingfieldi vajadustele kõrge tihedusega PCBde, Mini LED-i juhtplaatide ja teiste kõrgklassi toodete valmistamisel, vältides käsitsi paigaldamisel tekkivaid probleeme, nagu komponentide vale positsioon, tagurpidi paigaldamine või paigaldamata jäätmine, ning suurendades oluliselt asetsemise õnnestumismäära.
2. Automatiseeritud keevitus ja ühendamine
Robootne solderdamine on oluline protsess elektroside usaldusvääruse tagamiseks PCBdel.
Peamised tehnoloogiad hõlmavad:
· Reflow-keevitusrobotid: Need saavutavad komponentide partii jootmise täpse temperatuuri juhtimise kaudu, vältides külma jootekõvade, ühenduste ja ülekuumenemise kahjustusi, mis on levinud käsitsi jootmisel.
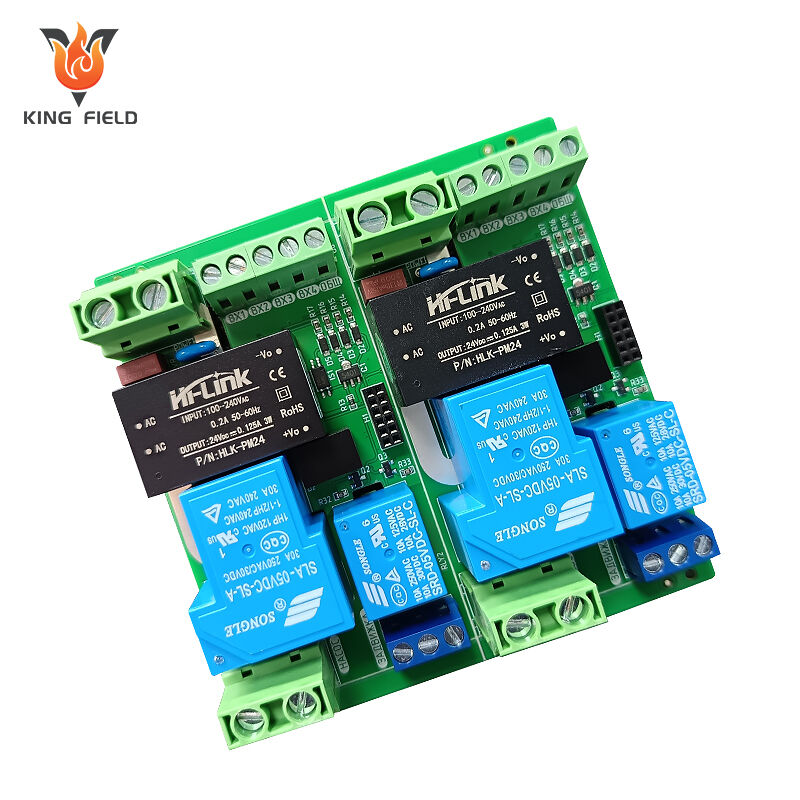
· Selektiivse laine keevitusrobotid: Need pritsivad jootetäite programmeeritavate nozzlite kaudu täpselt läbipuuritud komponentide jaoks, sobivad hübriidmontaaži (SMT+THD) PCBA toodete puhul ning parandavad jootmise ühtlust.
· Laserkeevitusrobotid: Kasutusel kõrge täpsuse ja usaldusväärsuse nõudmistes olukordades, neil robotitel on väike soojuse mõjutatud tsoon ja need sobivad väikeste jootekontaktide ja soojuse tundlike komponentide jootmiseks.
3. Sisestamise ja montaaži automatiseerimine
Läbipuuritud seadmete puhul, mis nõuavad käsitsi sisestamist, saavutab robotmontaažisüsteem automaatse sisestamise robotkäte ja fiksaatorite kombinatsiooniga:
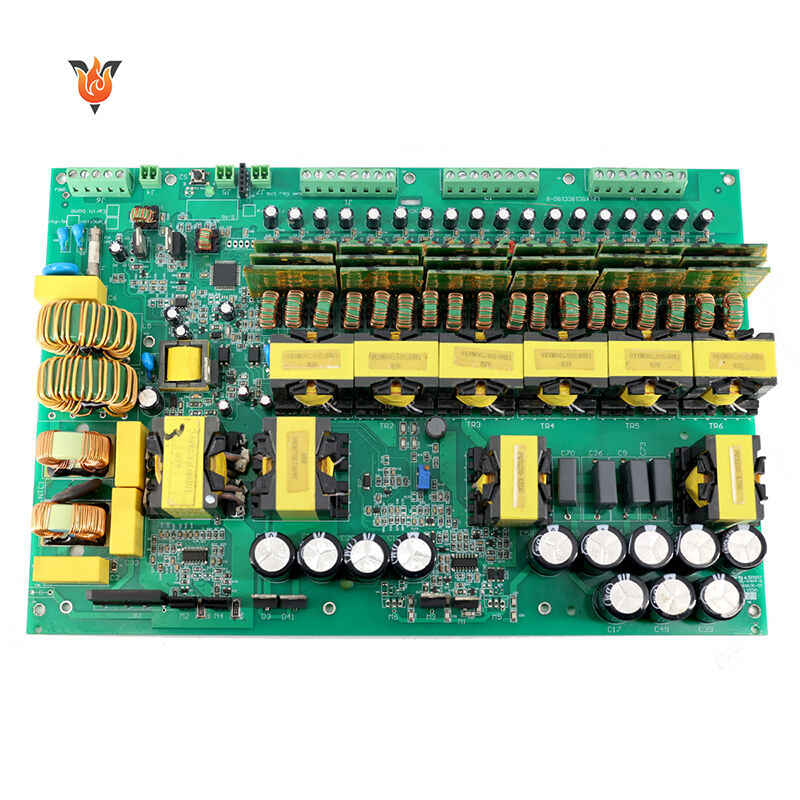
See toetab paindlikku lülitumist mitme seadmetüübi vahel ja kohaneb erinevate PCBA-toodete sisestusnõuetega programmeeritava loogikaga; See lahendab probleemid, nagu madal efektiivsus, kõrge töökoormus ja seadme kahjustamine, mida põhjustab ebaühtlane sisestusjõud käepeatlikus sisestamises, ja on eriti sobiv Kingfieldi suure tootmismahuga stsenaariumides, näiteks tööstusjuhtimisplaatide ja toiteplaatide puhul.
4. Automatiseeritud testimine ja kvaliteedikontroll
Robootika paigaldamise ja kontrolltehnoloogiate sügav integreerimine moodustab suletud tsükli „paigaldamine-kontroll“:
· Visuaalse kontrolli robot: Tuvastab automaatselt asetuse nihke, jootmise puudused ja puuduvad komponendid kasutades AI-pilve algoritme. Kontrollikiirus on 5–10 korda kiirem kui käsitsi kontroll, vähem kui 0,1% valepositiivse määraga;
· Toiteahela testimisrobot (ICT): Automaatselt teostab elektrojõudluse testimist plaatidel (PCBA) ja laeb andmed reaalajas MES-süsteemi kvaliteedi jälgitavuse tagamiseks;
· Röntgenuuringu robot: Tuvastab peidetud jootekontaktide defektid BGA-, CSP- ja muude pakendilahendustega seadmete aluse jootekontaktidel röntgenkiirte abil, tagades kõrge usaldusväärsusega toodete kvaliteedi.
5. Tagumine pakendamine ja lõppkokkupanek
PCBA tagumistes protsessides vastutab robotkomplekteerimine korpuse pakendamise, ühenduste sisestamise ja eemaldamise ning juhtmete jootmise eest: Koostöörüved töötavad inimestega sümfoonselt keerukate protsesside täitmiseks, näiteks raske korpuse montaaž ja täpne juhtmete jootmine, säilitades paindavuse ja täpsuse; Kohanemine Kingfieldi kohandatud vajadustega, mitme erineva tooteliigi ja väikeste partiidena tootmise kiireks ümberlülitamiseks, lühendades toote tarnimise tsükleid.
II. Robotkomplekteerimise põhieelised
1. Tõhususe parandamine: müüri murdmine käsitsi tootlikkuse kitsikuses
Robotid saavad töötada ööpäevaringselt ilma väsimata ega emotsionaalse segaduseta. Ühe robotite monteerimisjoone võimsus on 3–5 korda suurem kui käsitsi tootmistsiilu oma. Suurte tellimuste puhul saab saavutada "inimesteta tootmist" mitme roboti koostöö kaudu, mis võimaldab oluliselt lühendada tootmisperioodi ja aitab Kingfieldil kiiresti reageerida kliendi kohaletoimetamise vajadustele.
2. Kvaliteedi tagamine: toote ühtlase kvaliteedi pidev parandamine
Robotite montaažil on käsitsi monteerimisega võrreldes parem korduvus ja operatsiooniline stabiilsus, mis piirab defektide esinemissagedust, nagu paigutuse kõrvalekalded ja jootmisdefektid, alla ühe miljoni kohta. Digitaalse programmeerimise ja parameetrite fikseerimise kaudu tagatakse, et iga PCBA tootmistandard oleks täielikult ühtlane, mistõttu on see eriti sobiv valdkondadesse, kus nõutakse erakordselt suurt usaldusväärsust, näiteks autotehnika- ja meditsiiniseadmete valdkonnas, tugevdades sellega Kingfieldi mainet kvaliteedi poolest.
3. Kuluoptimeerimine: Tootmiskulude pikaajaline vähenemine
Kuigi algne investeering robotitesse on suur, pikaajalt võivad need oluliselt vähendada kulusid:
• Töökulu: Vähendab sõltuvust kvalifitseeritud töötajatest, langetades koolituse, rekruteerimise ja juhtimise kulusid;
• Kaotekulud: Vähendab komponentide kahjustamist ja printsiplaatide hävitamist, mida põhjustab käsitsi töötamine, langetades materjalikaotust;
• Halduskulud: Tootmismasinate MES-i süsteemi kaudu reaalajas tootmismasinate andmete jälgimine optimeerib tootmisgraafiku ja vähendab võimsuse raiskamist.
4. Paindlik tootmine: kohanduv erinevatele ja kohandatud vajadustele.
Modernsed robotite montaažisüsteemid toetavad kiiret programmeerimist ja ümberseadet. Kingfieldi kohandatud PCBA-tegevuse puhul saab tootmistoote parameetreid kohandada 1–2 tunni jooksul ilma suuremahuliste seadmete muudatusteta, võimaldades tõhusalt toota „väikesi partii, mitmeid partii“ tellimusi ning parandades turule reageerimisvõimet.
5. Turvalisuse uuendus: tootmisturvalisuse riskide vähendamine
PCBA tootmisprotsess sisaldab potentsiaalseid riske, nagu jootmine, kõrge temperatuur ja keemilised ained. Robotmontaaž võib asendada inimtööd kõrgriskantsete protsesside täitmisel ja vähendada töökohtade vigastuste ohtu. Samal ajal on koostöörobotitel kokkupõrke tuvastamise funktsioon, mis võimaldab neil ohutult koos inimestega töötada, säilitades tasakaalu tootlikkuse ja operatiivse turvalisuse vahel.
III. Kingfieldi robotmontaaži tehnilised omadused ja rakendusväärtus
Alates oma tehnoloogilise ekspertiisiga ja kliendivajadustega PCBA tööstuses on Kingfield arendanud "kohandatud + nutikas + integreeritud" robotmontaaži lahenduse:
• Kohandatud kohandamine: Robotite monteerimisparameetrite optimeerimine vastavaks erinevate valdkondade PCBA toodete omadustele;
• Intellectuaalne integreerimine: AI-põhise vaatekontrolli, MES-i tootmisjuhtimissüsteemi ja digitaalse kaksiku tehnoloogia integreerimine reaalajas jälgimise, andmete jälitusvõime ja tootmisprotsessi intellectuaalse optimeerimise saavutamiseks;
• Täisnimevaheline teenus: Pakkudes täisprotsessi teenuseid roboti valikust, tootmisjoone seadistamisest, programmeerimisest ja silpumisest kuni järelhoolde, aitades klientidel kiiresti ellu viia automatiseeritud tootmine ning langetada tehnilisi barreireid. Sügava rakendamise kauda roboti komponentide tehnoloogias saavutab Kingfield mitte ainult tootmisefektiivsuse ja toote kvaliteedi kahekordse parandamise, vaid pakub klientidele „tõhusaid, usaldusväärseid ja kohandatud“ PCBA-lahendusi, tugevdades oma tuumakonkurentsust kõrge tiheduse, kõrge usaldusväärsuse ja kohandatud PCBA-vallas ning edendades tööstuse nutikate valmistamise uuendust.

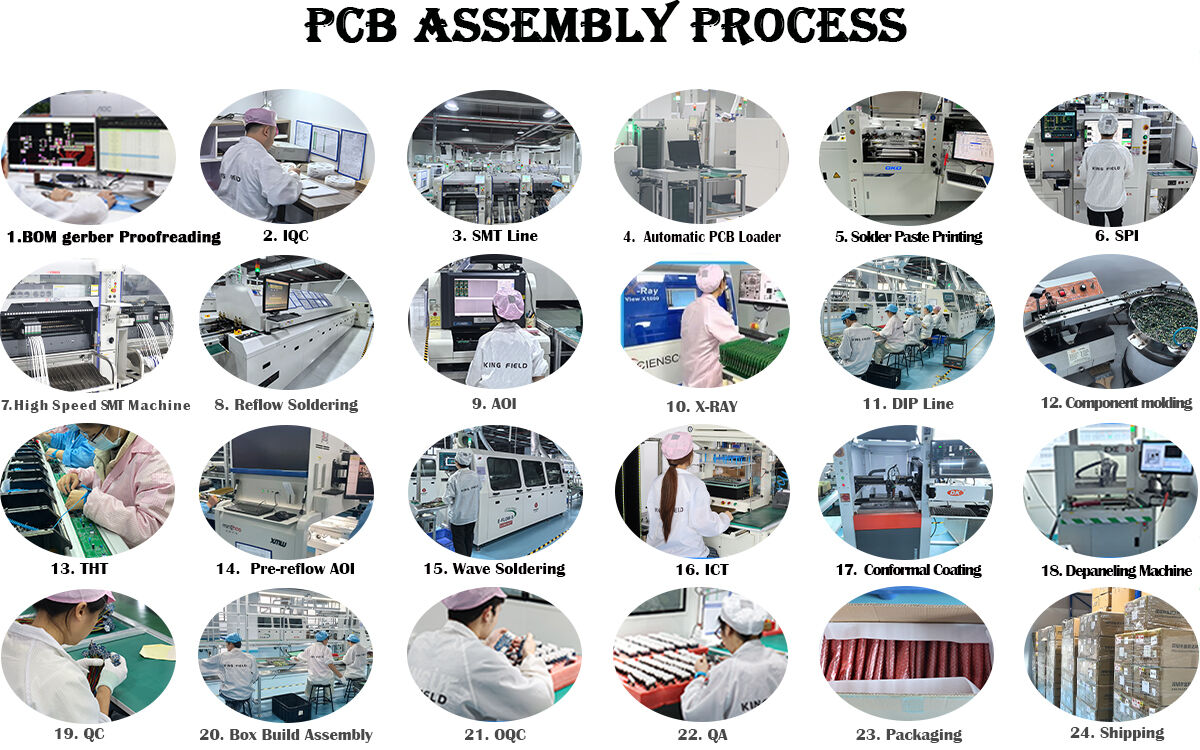
Montaažprotsess
Robot-PCB montaaži protsess samm-sammult
Robootiline PCB montaaž on automatiseeritud protsess, mis ühendab täpse mehaanika, visuaalse positsioneerimise ja nutikat juhtimist. Selle tuumaks on suletud tsükkel "täpne positsioneerimine – komponentide käsitlemine – täpne montaaž – kvaliteedikontroll". Järgnevalt toodud on standardiseeritud, samm-sammuline läbivaatamine, mis vastab tegelikule tööstuslikule tootmisloogikale:
1. Esialgsed ettevalmistused:
· PCB puhastamine ja positsioonimine: Robot võtab PCB-plaadi vastu automaatse laadimismooduli kaudu. Esialgu läbib plaat plasmapuhastuse või harjapuhastuse, et eemaldada sulamispadidelt õli ja tolm. Seejärel kinnitatakse PCB kandjale ja kalibreeritakse PCB koordinaatsüsteem viitepunktide visuaalse tuvastamise abil, et tagada montaaživiite täpsus.
· Parameetrite eelseadistamine ja programmi import: Põhinedes PCB disainidokumentidele, imporditakse juhtimissüsteemi komponentide koordinaadid, pakendispetsifikatsioonid ja monteerimise järjestus. Robot eelseadistab oma liikumisteekonna offline-programmeerimise või õppemoodusi, et vältida interferentsiohte.
· Materjali ettevalmistamine: Pindmonteeritavad komponendid paigutatakse rullratastele, taldrikutele või torujuksele. Pärast seda, kui materjalituvastusmoodul on kinnitanud komponendi mudeli ja orientatsiooni õigsuse, transporditakse komponendid roboti haardejaama.
2. Tuumakomplekt: Komponentide haaramine – positsioneerimine – montaaž
Samm 1: Komponentide haaramine Robootkäes on olemas vaakumnozli või haaramisseade, mis automaatselt vahetab komponendi suurusele vastavalt sobivale tööriistale. See kasutab näosüsteemi komponentide asukoha ja orientatsiooni tuvastamiseks riiulil ning haarab komponendid täpselt, vältides nende kahjustumist või langemist.
Samm 2: Komponentide orientatsiooni korrigeerimine Pärast komponentide haaramist toimub visuaalse kontrollimooduli poolt teisene identifitseerimine, et kõrvaldada mis tahes nihe või pöördenurk, tagades täpse joonduse perede ja traadiplaadi padjade vahel, eriti sobiv kõrge tihedusega pakendatud komponentidele, nagu BGA ja QFP.
Samm 3: Täpne paigaldus Robot liigub eelseaditud raja järgi vastavasse positsiooni plaat (PCB) ja asetab komponendi sujuvalt paddele või sisestab selle augu. Pinnakontaktse paigalduse protsessis vabastab vaakumnoozel rõhu kohe pärast komponendi kinnitamist paddele. Läbapuurimise protsessis aitab robotkäsi täielikult sisestada komponendi otsad, et tagada hea kontakt.
Samm 4: Keevitus ja kõvendamine SMT-paigalduse puhul toimetatakse monteeritud PCB refluksahjusse, kus jootekreem kõveneb kõrgetel temperatuuridel, et saavutada elektriline ühendus komponentide ja PCB vahel. Robotile saab lisada ka online-jootmise mooduli, et sooritada lainepaigaldusega komponentide lainejootmist või punktijootmist.
3. Kontroll: Reaalajas kinnitamine ja defektide eemaldamine
· Võrgupõhine visuaalne kontroll (AOI): Pärast roboti paigaldamist skaneerib AOI kontrolliseade automaatselt PCB-d, võrdleb seda standardpiltidega ning tuvastab puuduvad komponendid, vale komponendid, nihkes asetsemine ja külmetoru ühendused, kontrollides täpsusega kuni mikroni taseme.
· Elektriliste omaduste testimine: Voodipoltide testimise või lendava proovija moodulite kaudu testitakse PCB toki elektrilisi parameetreid, nagu juhtivus ja isoleeritus, et kõrvaldada peidetud veapunktid.
· Vigade käsitlemine: Tuvastatud defektsete toodete märgistatakse automaatselt ja transporteeritakse pärasttöötlemise töökohale, samas kui sobilikud tooted liiguvad järgmise protsessi poole, saavutades automaatse suletud tsükli „montaaž-kontroll-sortimine“.
4. Järgmised protsessid: Lõpetatud toote töötlemine ja andmete jälgitavus
• Prindi puhastamine ja kaitse: Kvalifitseeritud tooted läbivad tolmu eemaldamise ja konformse katmise, millele järgneb uus silmapaistev kontroll, et tagada, et ei jääks tagasi saasteaineid ega montaaživeo.
• Automaatne tühjendamine ja pakendamine: Robotid eemaldavad monteeritud plaatkanded kandjatest ja ladustavad need korralikult partidesse paakidesse või transportliinidele, oodates järgnevaid pakendusprotsesse.
• Andmete registreerimine ja jälgitavus: Montaažiparameetrid kogutakse kogu protsessi vältel ja sünkroonitakse MES-süsteemiga, et genereerida tootmisaruannet, mis toetab täielikku toote elutsükli jälgitavust ning soodustab protsessioptimeerimist ja kvaliteedikontrolli.
Tootmiskapasiteet
| Seadmete valmistamise protsessi võimekus | |||||
| SMT Võimsus | 60 000 000 kiipi/päev | ||||
| THT mahtuvus | 1 500 000 kiipi/päevas | ||||
| Kohaletoimetamise aeg | Kiirendatud 24 tundi | ||||
| PCB tüübid, mida saab monteerida | Kõvad plaadid, paindlikud plaadid, kõva-paindlikud plaadid, alumiiniumplaadid | ||||
| PCB spetsifikatsioonid montaaži jaoks | Maksimaalne suurus: 480x510 mm; Minimaalne suurus: 50x100 mm | ||||
| Minimaalne monteeritav komponent | 01005 | ||||
| Minimaalne BGA | Kõvad plaadid 0,3 mm; Fleksid 0,4 mm | ||||
| Minimaalne peenepitsaga komponent | 0,2 mM | ||||
| Komponentide asetlemise täpsuse tagamiseks | ±0,015 mm | ||||
| Maksimaalne komponendi kõrgus | 25 mm | ||||

